새로운 전기 아틀라스 플랫폼의 출시
보스턴 다이나믹스의 유튜브로 공개된 영상에서 아틀라스가 갑자기 은퇴를 선언합니다. 그동안의 아틀라스 개발 과정과 넘어지고, 실패하는 모습, 유압관이 터지면서 기름이 흐르는 모습 등을 보여줍니다. 영상이 공개된 지 하루가 지나서 올 뉴 아틀라스라는 새로운 아틀라스를 공개하네요.
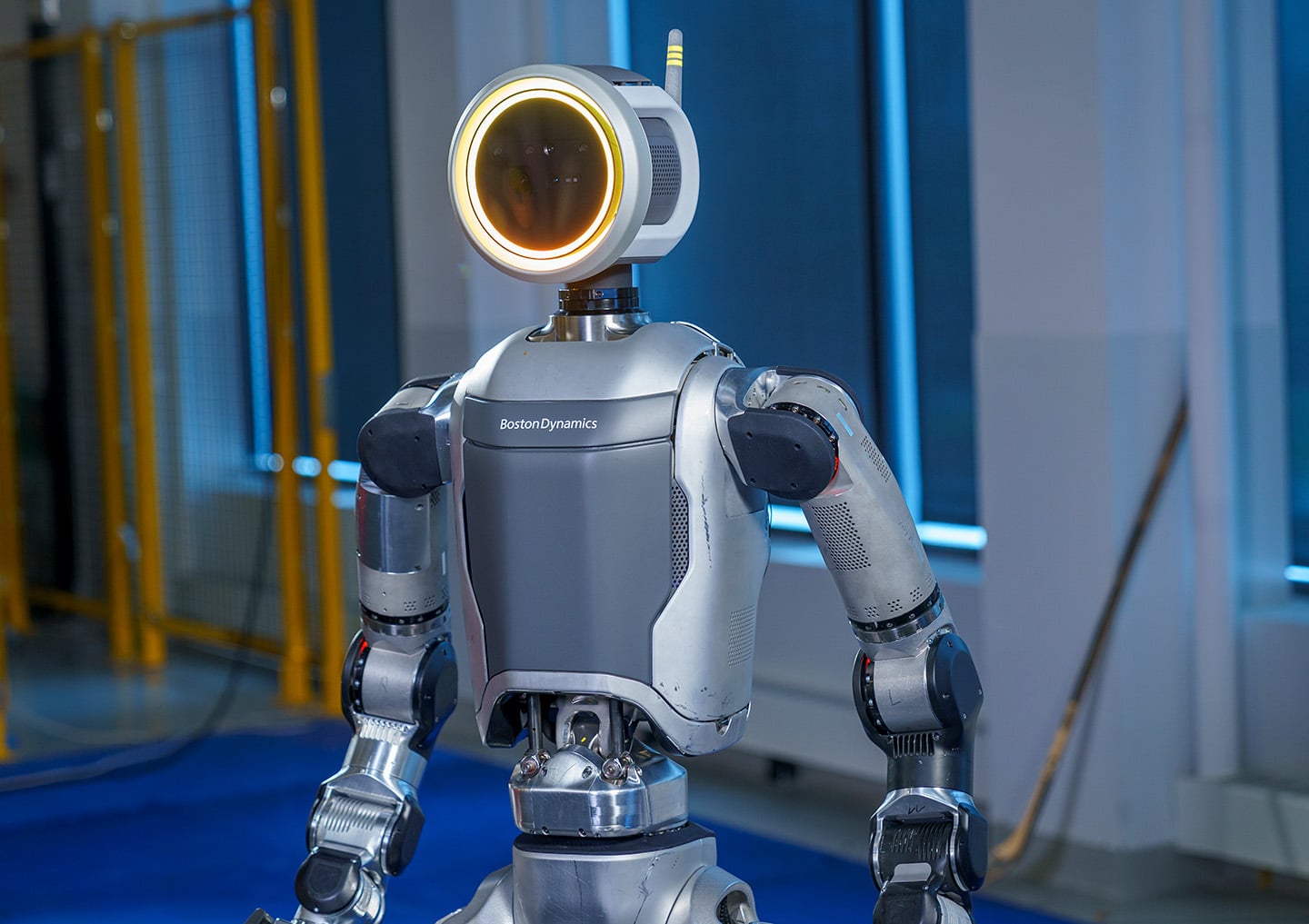
새로 공개된 아틀라스는 30초 분량의 영상에서 기존 아틀라스보다 더 높은 완성도를 보여주며 놀랍고 재미있는 모습으로 등장하는데요.
공개된 영상에서 보면 새로운 아틀라스는 얼굴이 원형 LED로 불 들어오는 형태로 귀엽고 친근한 생김새를 하고 있습니다. 관절이 자유자재로 움직이며 누워있는 자세에서 기괴한 동작으로 일어나 깡통 로봇처럼 저벅저벅 걸어 나가는 모습입니다. 짧은 영상에서 정말 대단하다고 느끼며 충격에서 벗어나질 못했는데요.
영상을 자세히 보면 고관절과 다리 관절, 목 관절, 허리가 360도 회전하는 모습을 볼 수 있습니다.
이러한 모습으로 볼 때 로봇의 형태는 사람과 비슷한 휴머노이드 로봇이지만 360도 회전하는 관절과 움직임으로 사람보다 뛰어난(사람이 하지 못하는) 동작을 구현할 수 있을 것으로 보입니다.
보스턴 다이내믹스 (Boston Dynamics)
보스턴 다이내믹스는 1992년 미국 MIT의 Spin Off Company형태로 회사가 창립되고 빅독, 치타, 스팟 등 자연스러운 움직임의 로봇을 공개해 관심을 받았습니다. 지금은 세계 최고의 로봇 기업으로 평가
rosa.sjmts.com
슬립링의 사용
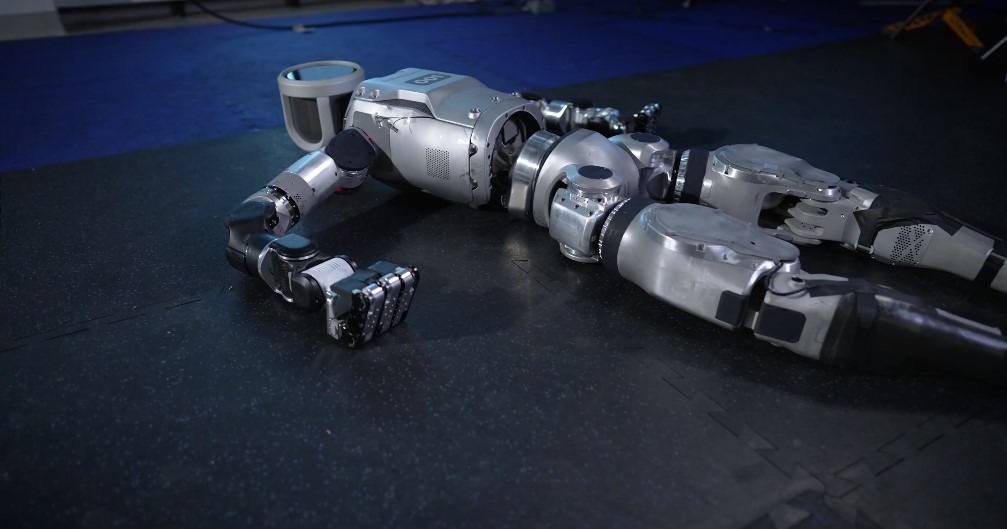
영상에서는 관절이 360도 회전하여 변신 로봇처럼 다리와 목과 허리가 앞, 뒤로 움직이는데요. 이런 움직임에서 다리를 움직이기 위한 신호를 주는 전선이 꼬이기 때문에 일부관절 부분에 ‘슬립링’을 사용한 것으로 보입니다.
슬립링은 전기 모터나 로봇과 같은 회전 기계에서 전선이 꼬이는 문제를 극복하기 위해 전기적 연결을 가능하게 하는 장치입니다. 일반적으로 금속 또는 그래파이트로 만들어진 링과 그 링에 접촉하는 브러시로 구성되어 있습니다. 이를 통해 회전하는 부분으로 전기 신호나 전력을 전송할 수 있습니다. 슬립링은 CCTV 카메라, 풍력 발전기, 의료 장비 등 다양한 분야에서 사용됩니다.
슬립링의 기본 원리
슬립링은 회전축에 부착되어 회전하는 링(ring)과 이 링에 접촉하여 전기신호를 전달하기 위한 브러시(brush)로 구성됩니다. 이 두 구성 요소 사이의 접촉을 통해 회전 부분으로 전기적 연결이 이루어지며, 이를 통해 전력이나 데이터 신호가 전송됩니다.
슬립링의 구성 요소
링(Rings): 보통 도체성이 좋은 금속으로 만들어지며, 때로는 내구성이나 특정 환경 요구사항에 따라 금, 은, 구리 또는 그라파이트 등이 사용됩니다. 링의 수는 전달해야 하는 신호의 수에 따라 다양할 수 있습니다.
브러시(Brushes): 링에 접촉하여 전기 신호를 전달하는 부분으로, 금속이나 그라파이트 재질로 제작됩니다. 브러시는 내마모성과 전기 전도성이 뛰어나야 하며, 접촉면의 마찰이 있기 때문에 주기적인 유지보수가 필요할 수 있습니다.
슬립링의 응용 분야
산업용 로봇: 로봇의 팔이 회전할 때 전력과 데이터를 전달합니다.
풍력 발전: 터빈 블레이드가 회전하면서 발생하는 전력을 탑재 부분으로 전송합니다.
의료 기기: CT 스캐너와 같은 회전하는 부분에 전력과 데이터를 전송하여 고해상도 이미지를 생성합니다.
비디오 감시: 회전하는 CCTV 카메라에 전력과 영상 데이터를 전송합니다.
슬립링의 장점과 단점
연속적인 전력과 데이터 전송: 회전 중에도 끊김 없이 안정적으로 전력이나 데이터의 전송이 가능합니다.
맞춤형 설계 가능: 다양한 환경과 요구 사항에 맞춰 설계가 가능합니다. 회전체에 데이터 전송 중에도 360도 이상 회전이 가능하며, 전선이 꼬이지 않습니다.
다양한 속도와 환경에서의 운용: 높은 회전 속도와 다양한 환경 조건에서도 사용할 수 있습니다.
마모 및 유지보수의 필요성: 슬립링의 브러시와 링 사이의 물리적 접촉은 마모를 발생시키며, 이는 접촉면의 마찰에 의한 손상이 발생할 수 있습니다. 이러한 마모는 슬립링의 수명을 감소시키고 성능 저하를 초래할 수 있습니다. 마모된 부품을 정기적으로 점검하고 교체해야 하므로 유지보수 비용이 발생합니다.
전기적 소음 및 간섭: 브러시와 링 사이의 접촉 불안정으로 인해 전기적 소음이 발생할 수 있습니다. 이는 데이터 전송 시 신호 간섭을 유발하여 잡음 발생 또는 신호의 질을 떨어뜨릴 수 있습니다. 특히 높은 속도에서 슬립링을 사용할 경우, 전기적 간섭이 증가할 수 있으며, 이는 전자 장비에서 불안정한 동작을 유발할 수 있습니다.
전력 전송 한계: 접촉 저항 때문에 전력이 손실될 수 있으며, 이는 전체 시스템의 효율성을 감소시킬 수 있습니다. 각 링은 일정한 전류를 견딜 수 있으며, 이 한계를 초과할 경우 과열이나 손상이 발생할 수 있습니다.
열 발생: 브러시와 링 사이의 마찰과 전기적 저항은 열을 발생시키며, 이로 인해 추가적인 냉각 솔루션이 필요할 수 있습니다.
설계 및 제조의 복잡성: 고성능을 요구하는 응용 분야에서 슬립링의 설계와 제조는 복잡하고 정밀해야 합니다. 이는 제조 비용을 증가시키며, 공간과 설치 요구 사항을 제한할 수 있습니다.

유압식 액추에이터와 전동 액추에이터
새로운 아틀라스의 큰 변화로는 유압식에서 전기식 액츄에이터로 바뀌었다는 겁니다. 유압식 로봇을 만들면서 유압식의 단점과 제어하기 어려운 부분을 많이 극복했다고 생각했는데요. 유압식의 한계를 느낀 것 같습니다.
기존 아틀라스는 유압식 액츄에이터가 28개 사용되었습니다. 춤을 추고 공중제비를 돌거나 파쿠르 동작을 하는 모습을 보여줬었는데요. 이런 동작은 유압 모터를 사용하여 가능했던 구동입니다.
새로 개발된 아틀라스는 전동모터를 사용하였는데도 높은 힘을 낼 수 있다고 합니다. 전동액츄에이터의 단점이자 유압식의 장점을 개선한 것으로 보입니다.
유압식과 전동방식 액츄에이터의 차이점은 아래와 같습니다.
전동모터
1 전기만을 사용하여 기계적 에너지를 생성합니다.
2 상대적으로 빠른 속도로 작동하며, 에너지 효율이 높습니다. 정밀한 속도 조절이 용이하고, 반응 시간이 짧습니다.
3 구동부의 크기가 작게 만들 수 있습니다.
4 비교적 설계가 간단하고 유지보수가 용이합니다. 또한, 내구성이 높아 장기간 안정적인 성능을 유지할 수 있습니다.
유압식 액츄에이터
1 압축된 오일을 사용하여 움직임을 생성합니다. 유압 펌프가 오일을 액츄에이터로 보내 압력을 발생시키며, 이 압력이 실린더를 밀거나 당겨서 움직임을 만듭니다.
2 전동모터에 비해 속도가 느릴 수 있으나, 매우 큰 힘을 낼 수 있는 강력한 출력이 가능합니다. 그러나 에너지 손실이 더 클 수 있고, 유압 오일 누출 등의 유지 보수가 필요할 수 있습니다. 전기 모터에 비해 정밀한 제어가 어렵습니다.
3 전기방식보다 상대적으로 구동부의 크기가 크게 만들어집니다.
4 시스템 설계가 복잡하고 유압 오일, 필터, 펌프 등을 정기적으로 점검하고 교체해야 합니다. 유압 오일 누출이나 갑자기 큰 힘을 낼 때 유압관이 터질 수 있습니다.
5 무게 대비 더 많은 에너지를 필요로 하기 때문에 배터리가 많이 소모됩니다.

손가락
이번 영상에서 손가락의 움직임은 보여주지 않았는데요. 손가락은 3개만 있는 것으로 보이고, 접힌 손가락의 모양이 평평한 것이 눈에 띄네요. 물구나무서기 좋은 듯한 모양입니다. 다음 영상에서 손의 사용과 쓰임새에 대해 공개할 것으로 보입니다. 3개의 손가락으로 어느 정도까지 활용할 수 있을지 궁금합니다.
테슬라 옵티머스(테슬라 봇, Optimus)
옵티머스 미국의 전기차 기업 테슬라가 로봇을 만들겠다고 선언한 뒤 1년 만에 옵티머스라는 로봇을 갖고 나타났습니다. 정말 대단한 테슬라네요. 6개월 전에도 로봇을 공개했는데 혁신적으로
rosa.sjmts.com
인공지능의 적용 여부
아틀라스는 지금까지 공개된 영상에서는 계단을 오르고 좁은 외나무다리를 건너고, 가방을 짚어서 던지고, 공중제비를 도는 동작을 보여줬는데요. 이런 동작이 단순 학습으로 가능한 것은 아닙니다. 스스로 사물을 인식하고 판단하여 적절한 동작을 취하는 제어회로가 필요한데요.
올빗(Orbit)이라는 소프트웨어를 적용하여 AI 학습에 의한 자율제어, 원격조작, 집단적인 움직임 등을 수행할 수 있을 것으로 보입니다.
이번에 공개된 영상은 단지 누워있는 아틀라스가 기괴한 모습으로 일어서서 관절이 360도로 돌아가는 모습으로 걸어 나가는 장면만 보여줬습니다. 앞으로도 새로운 아틀라스의 움직임을 영상으로 공개하게 될 텐데요. 어떤 동작으로 우리를 놀라게 해 줄지 기대가 됩니다.
보스턴다이내믹스의 아틀라스는 테슬라의 옵티머스와는 다르게 상용 로봇이 아닌 연구 개발용 로봇이라고 했었습니다. 하지만 이번에 공개된 올 뉴 아틀라스는 현대자동차 공장에 배치되어 자동차 제조에 투입될 것으로 예상됩니다. 아틀라스도 연구개발 목적에서 상업용으로 전환한 것으로 보이는데요. 언제 어떤 방식으로 상업용으로 개발되어 일반에 판매될지 주목됩니다.
신형 아틀라스를 개발하는 과정 중 현대자동차에서 많은 부분을 지원해 줬다고 합니다.
저도 처음에는 현대차가 왜 보스턴 다이내믹스를 인수했는지 이해할 수 없었는데요. 이제는 좀 알 수 있을 것 같아요. 테슬라가 옵티머스를 만들려고 하는 것과 같은 방향으로 아틀라스를 현대차에 투입시키려고 하고 있습니다. 나중에는 아틀라스가 자동차를 운전하게 될 수도 있겠죠.
새로운 아틀라스가 공개되자 테슬라의 일론머스크는 옵티머스와 겨루어 보자며 대결을 신청했다고 합니다. 이렇게 테슬라와 보스턴 다이내믹스가 경쟁하는 모습이 이어지고 있는데요. 멀지 않은 미래에는 아틀라스와 옵티머스가 2종 격투기처럼 로봇 레슬링을 하는 모습을 볼 수도 있지 않을까 생각해 봅니다.
'엔지니어링 > 로봇 ROBOT' 카테고리의 다른 글
| 테슬라 옵티머스(테슬라 봇, Optimus) (0) | 2023.03.19 |
|---|---|
| 보스턴 다이내믹스 (Boston Dynamics) (0) | 2023.03.06 |


댓글